Raffinierte Robotik-Systeme können dem Menschen bekanntlich bereits bestimmte Arbeiten abnehmen oder spezielle Aufgaben erledigen. Für einige Anwendungen wären allerdings vielseitigere Konzepte wünschenswert – Roboter, die sich spontan an neue Herausforderungen und Aufgaben anpassen können. Ein vielversprechender Ansatz sind dabei aus Modulen aufgebaute Systeme, die sich schnell zu neuen Konfigurationen umgestalten lassen. Solche Konzepte wurden bereits entwickelt, es besteht allerdings weiterhin Optimierungsbedarf. Denn die bisherigen Entwicklungen sind meist kompliziert und durch die Verwendung von Gleichstrommotoren relativ schwer sowie energiehungrig.
Muskulöse Hexagonal-Einheiten
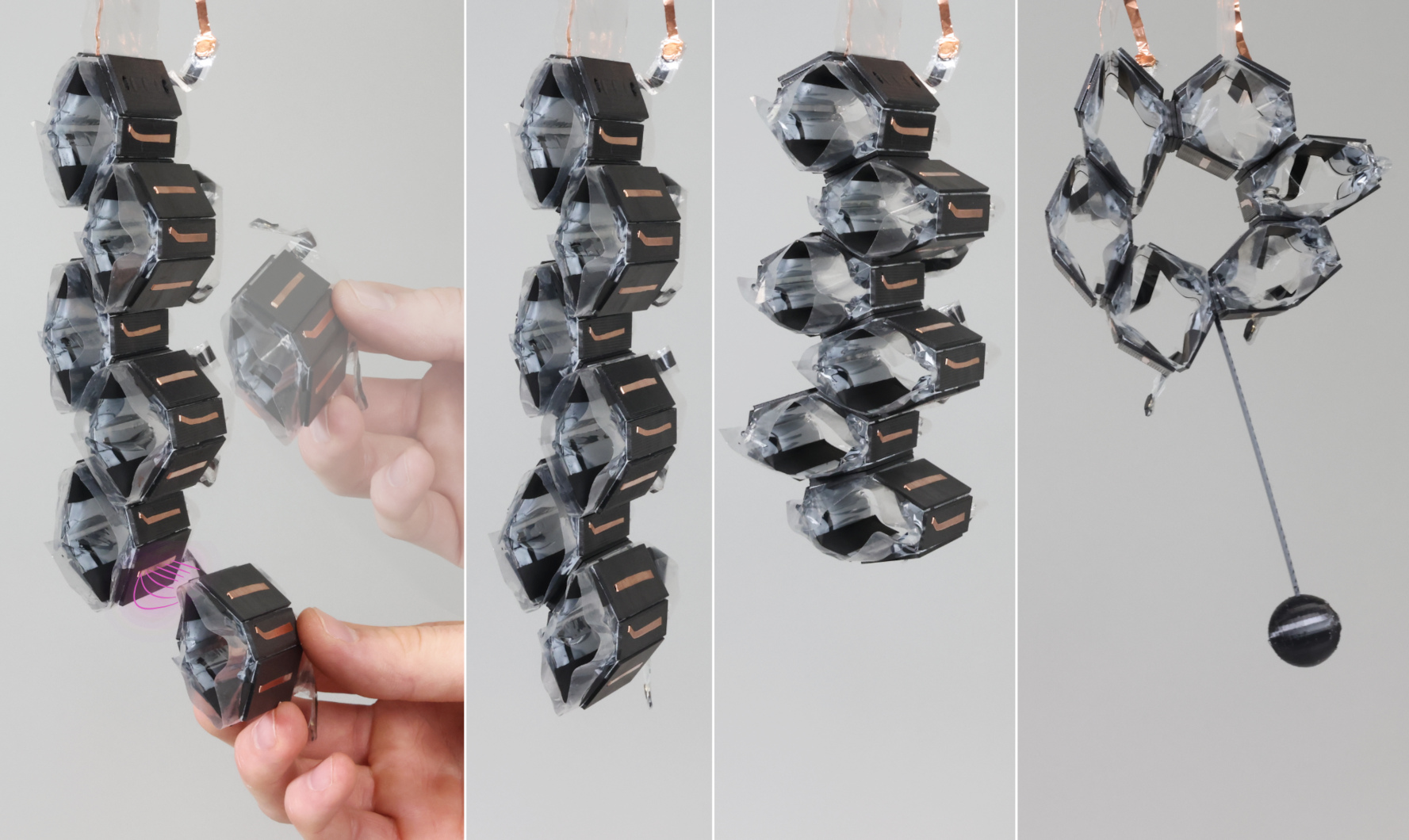
Das neue System, das nun Forschende vom Max-Planck-Institut für Intelligente Systeme in Stuttgart (MPI-IS) präsentieren, ist dagegen vergleichsweise „schlank“. Es basiert auf Modulen, die aus sechs leichten Glasfaser-Plättchen gebildet werden, die über flexible Gelenk-Stellen miteinander verbunden sind. An ihnen setzten statt Motoren elektrohydraulische Beutel an, die die starren Elemente bewegen – ähnlich wie bei Tieren die Muskeln die Knochen. Durch Anlegen von Spannung an das Modul ziehen sich die unterschiedlich polarisierten Wände im oberen Teil der Kunst-Muskel-Beutel aufgrund von elektrostatischer Anziehungskraft zusammen. Dabei wird dann Flüssigkeit verlagert, wodurch sich die Kunst-Muskeln verkürzen.
Video: Ein HEXEL-Modul springt hoch in die Luft. © Darrell J. Irvine
Bei den sogenannten HEXEL-Modulen führt dies zu einer Beugung der Gelenke zwischen den Glasfaser-Plättchen, sodass sie ihre Form von lang und schmal zu breit und flach ändern. Wie die Forschenden demonstrieren, ermöglicht die elektrostatische An- und Endspannung eine sehr schnelle Formänderung der HEXEL-Module. Die Bewegung ist dabei so schlagartig, dass sie auf das Vierfache ihrer eignen Größe hochspringen können. Außerdem lässt sich der Effekt nutzen, um einen Ball in die Luft schnellen zu lassen, zeigen die Entwickler.

Gestaltungsmöglichkeiten nach dem LEGO-Prinzip
Besonders kraftvoll und vielseitig einsetzbar werden die HEXELs allerdings durch die Verknüpfung zu komplexen Einheiten. Dies wird durch Magnete möglich, die das Team in die sechs Glasfaser-Plättchen jedes Moduls integriert hat. Über die Anziehungskraft können diese dann nach dem LEGO-Baustein-Prinzip zu verschiedenen Formationen zusammensetzt werden. Dabei lassen sie sich auch elektrisch koppeln, sodass die Aktivierungsspannung an bestimmte Funktionseinheiten übertragen werden kann. „Indem wir mehrere Module miteinander verbinden, können wir neue Robotergeometrien schaffen und sie für unterschiedliche Anforderungen wiederverwenden“, sagt Co-Erst-Autorin Ellen Rumley vom MPI-IS.



