Sperrig und durch surrende Propeller angetrieben – aquatische Roboter sind meist starr und laut, was ihren Einsatz in komplexen und empfindlichen Unterwasserwelten problematisch macht: Die „technischen Ungetüme“ können dort Lebewesen stören oder filigrane Strukturen beschädigen. Um sanftere Robotik-Systeme zu entwickeln, lassen sich Wissenschaftler deshalb mittlerweile auch von den Lebewesen der Unterwasserwelten inspirieren. Durch Konzepte der sogenannten Softrobotik entstanden auch bereits Versionen, die pulsierend durchs Wasser gleiten – also den Quallen nachempfunden sind. Doch die Leistungsfähigkeit dieser Systeme ließ bisher zu wünschen übrig.
Pflanzenöl-Beutel als Muskeln
Zur Entwicklung wirklich praktischer Quallen-Roboter könnte nun hingegen das Konzept führen, das die Forscher vom Max-Planck-Institut für Intelligente Systeme (MPI-IS) in Stuttgart präsentieren. Ihre etwa handgroßen Jellyfish-Bots gleiten ebenfalls durch pulsierende Bewegungen lautlos durchs Wasser. Innovativ ist dabei, dass dies auf den Kontraktionen von Armen beruht, die mit künstlichen Muskeln ausgerüstet sind. Es handelt sich dabei um mit Pflanzenöl gefüllte Kunststoffbeutel, die durch elektrische Aufladung aktiviert werden. Neben einer effektiven und energieeffizienten Fortbewegung ermöglichen die kräftigen Ärmchen den Jellyfish-Bots dabei auch Greiffunktionen.
Die gesamte Konstruktion ist aus mehreren weichen und festen Komponenten aufgebaut: Einige stabilisieren das schirmförmige Gebilde, andere machen es schwimmfähig. Eine Polymerstruktur an den Ärmchen fungiert dabei als Schwimmhaut. Für die Bewegungen werden die künstlichen Muskeln durch das Anlegen einer Spannung positiv aufgeladen. In Kombination mit dem negativ geladenen Umgebungswasser entsteht dadurch eine Kraft, die das Öl innerhalb des Beutels verschiebt, erklären die Wissenschaftler. So lassen sich die Beutel zusammenziehen und entspannen – ähnlich wie echte Muskeln.
Der Prototyp des Systems verfügt über sechs derart ausgerüstete Arme, die gemeinsam oder unabhängig voneinander angesteuert werden können. Dadurch lässt sich der Roboter auch beim Schwimmen lenken. Er erreicht dabei mit bis zu 6,1 Zentimetern pro Sekunde höhere Geschwindigkeiten als bisherige Systeme, benötigt aber nur eine geringe Leistung von etwa 100 Milliwatt, berichten die Entwickler.
Abfälle im Griff
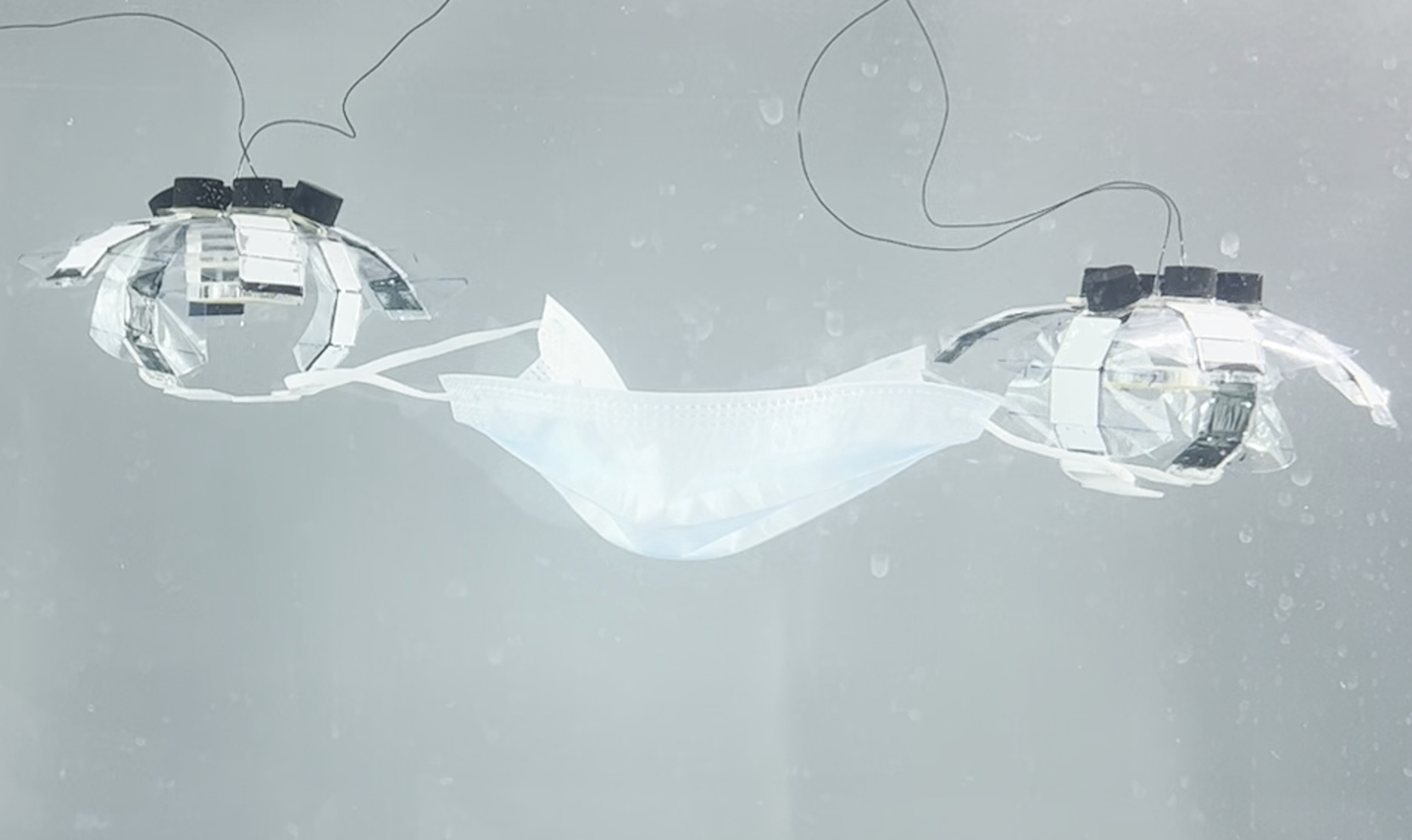
Der Roboter kann Objekte auf zwei unterschiedliche Arten erfassen – nach Quallenart berührungsfrei oder aber „handfest“. „Wenn eine Qualle nach oben schwimmt, kann sie Objekte auf ihrem Weg einfangen, da sie Strömungen um ihren Körper herum erzeugt. Auf diese Weise sammelt sie auch ihre Nährstoffe. Unser Roboter lässt das Wasser um ihn herum ebenfalls zirkulieren“, erklärt Erst-Autor Tianlu Wang vom MPI-IS. Auf diese Weise entsteht ein Strömungssystem, durch das der Jellyfish-Bot kleine und leichte Objekte berührungslos aufsammeln kann, zeigten Tests. “So kann er etwa Abfallpartikel an die Oberfläche befördern, wo sie später recycelt werden können. Auf diese Weise wäre er außerdem in der Lage, biologische Proben wie beispielsweise Fischeier zu sammeln“, sagt Wang.



