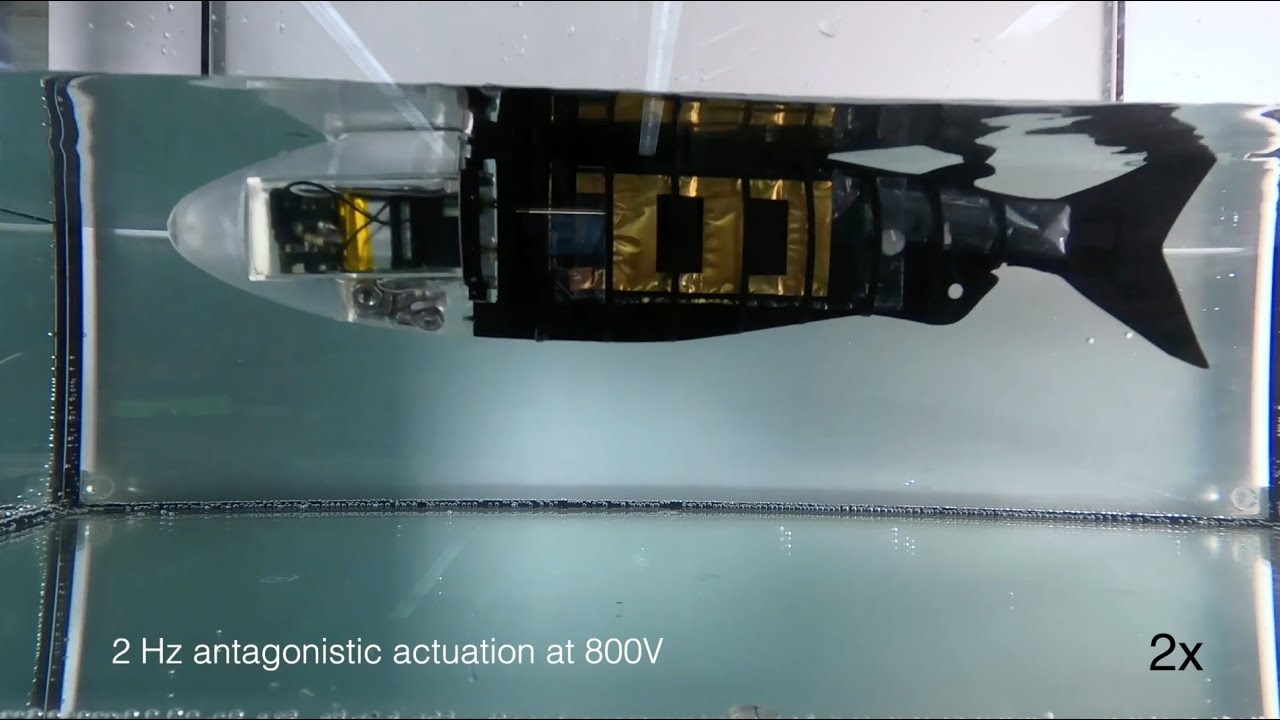
Die innovativen Kunst-Muskeln können diesem Fisch-Roboter kabellos Antrieb verschaffen. © Gravert et al. Science Advances 2024
Bisher war problematische Hochspannung nötig, um die Funktion ihrer natürlichen Vorbilder nachzuahmen. Doch nun haben Forschende künstliche Muskeln entwickelt, die auf praktikable Weise Kraft entwickeln können. Durch ein neuartiges Hüllmaterial ist nur relativ geringe Spannung für die Kontraktion der ölgefüllten Beutel nötig. Sie lassen sich dadurch leichter, robuster und weniger Stromschlag-gefährlich gestalten, wie erste Beispielanwendungen verdeutlichen. Zukünftig könnte die Technik zur Entwicklung von optimierten Robotern, Prothesen oder sogenannten Wearables führen, sagen die Wissenschaftler.
Harte und steife Strukturen, angetrieben von Motoren – neben diesen herkömmlichen Systemen haben mittlerweile geschmeidigere Konzepte in die Robotik Einzug gehalten: Die Kreationen der sogenannten Softrobotik orientieren sich dabei an den Materialien und Verfahren der Natur. Diese Entwicklungen bieten durch ihre flexiblen Merkmale vielfältiges Anwendungspotenzial in der Industrie, Medizin oder Forschung. Auch was den Antrieb der beweglichen Teile von Softrobotern betrifft, lassen sich die Entwickler von der Natur inspirieren. Statt herkömmlicher Motoren werden Konzepte eingesetzt, die die Funktion von Muskeln nachahmen. Neben der sanften Bewegungsweise könnten solche Einheiten auch energetische Vorteile bieten, so die Hoffnung.
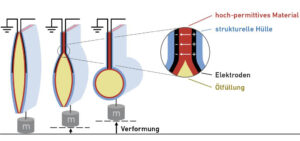
Das bisher leistungsfähigste System künstlicher Muskeln orientiert sich dabei stark an dem biologischen Vorbild: Es handelt sich um Gebilde, die sich beim Anlegen einer Spannung zusammenziehen – ähnlich wie Muskelfasern durch Nervenimpulse. Der künstliche Muskel besteht aus einem Beutel, der mit einer Flüssigkeit gefüllt ist. Durch das spezielle Hüllmaterial kann durch das Anlegen einer Spannung eine verkürzende Verformung des Beutels ausgelöst werden – es entsteht Zugspannung. Aus der Kombination mehrerer Beutel lässt sich damit ein sogenannter Aktuator bilden, der ähnlich wie ein Bündel von Muskelfasern für Bewegung sorgen kann.
Bisher zu hohe Spannungen nötig
Bisher hatte das Konzept allerdings einen Haken: Die Aktuatoren ziehen sich nur effektiv zusammen, wenn hohe Spannungen von etwa 6000 bis 10.000Volt angelegt werden. Dadurch mussten die künstlichen Muskeln an große und schwere Spannungsverstärker angeschlossen werden, was das Konzept für den Einsatz bei kleineren und kabellosen Robotern kaum praktikabel machte. Außerdem musste für eine gute Isolation der Einheiten gesorgt werden und die Systeme bargen das Risiko für gefährliche Stromschläge bei der Handhabung. Deshalb hat sich das Forschungsteam um Stephan-Daniel Gravert von der Eidgenössischen Technischen Hochschule Zürich (ETH Zürich) der Optimierung des Kunst-Muskel-Konzepts gewidmet.