

Wackelig stolpern sie durch die Gegend: Neugeborene Tiere sind zunächst unbeholfen unterwegs. Wie sie dann lernen, ihre Beine geschickt einzusetzen, simuliert nun ein Roboter-Hund: Durch ein lernfähiges Computersystem, das als künstliches Nervensystem fungiert, kann „Morti“ seine Bewegungsmuster optimieren. In nur einer Stunde erlernt der Roboter dadurch selbstständig, sich flüssig zu bewegen. Das Konzept kann damit der Grundlagenforschung an der Schnittstelle zwischen Robotik und Biologie dienen, sagen die Wissenschaftler.
Bei einem Fohlen wird es besonders deutlich: Neugeborene Tiere müssen erst lernen, ihre Muskeln und Sehnen koordiniert einzusetzen, um sich souverän fortbewegen zu können. Bei den frühen Gehversuchen schützen anfangs nur stabilisierende Bewegungen auf der Basis von Reflexen die Jungtiere vor heftigen Stürzen. Die feinere Muskelkontrolle muss sich hingegen erst entwickeln. Grundsätzlich zeichnet sich dabei ab: Der sogenannte zentrale Bewegungsmuster-Generator im Rückenmark wird bei den holprigen Gehversuchen geschult, bis die Bewegungssteuerung dem Jungtier schließlich eine gute Kontrolle über die Beine ermöglichen kann. Doch wie genau das abläuft, ist unklar.
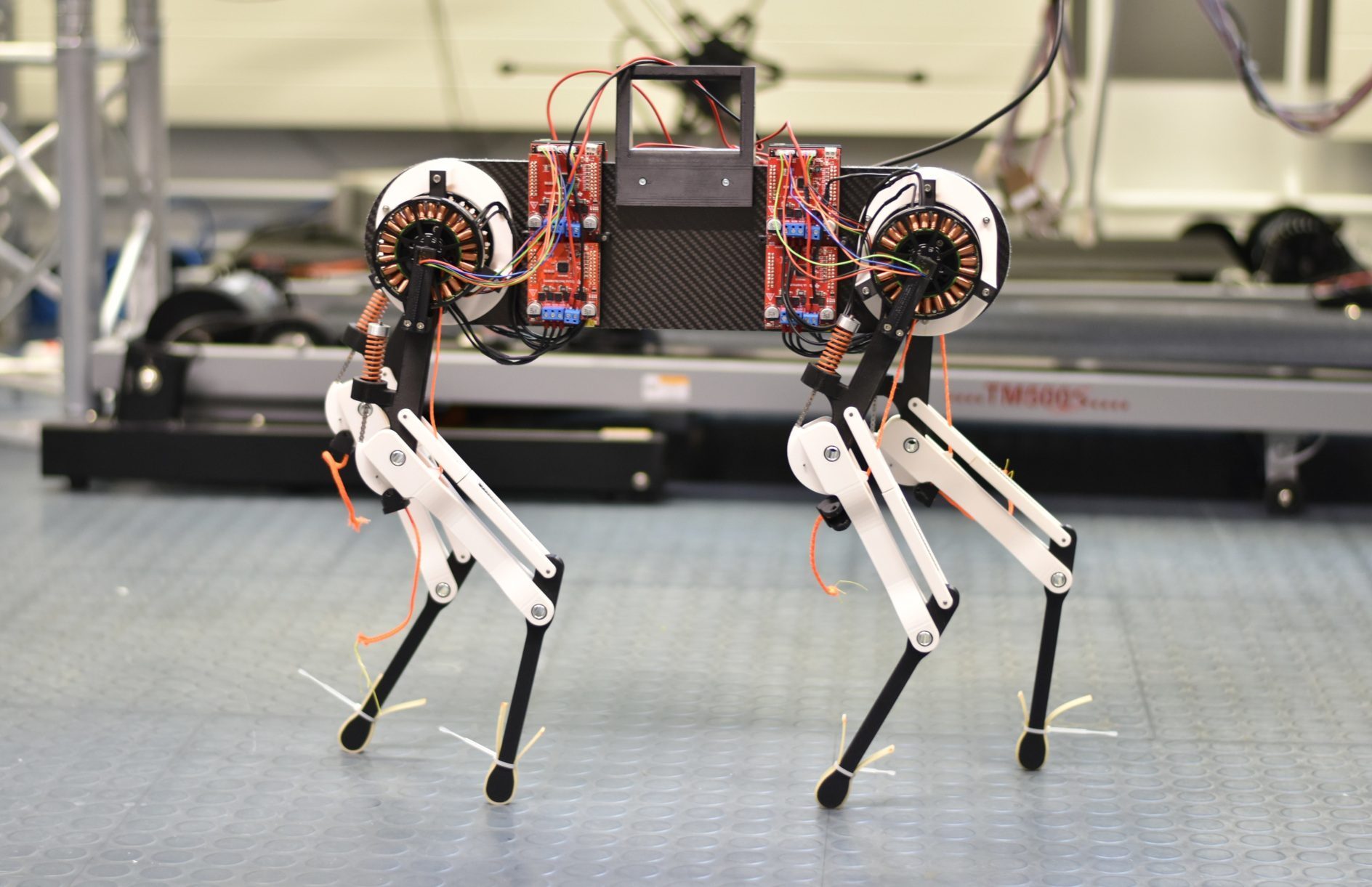
„Wir können das Rückenmark eines lebenden Tieres schlecht erforschen. Aber es lässt sich im Roboter modellieren“, sagt Alexander Badri-Spröwitz vom Max-Planck-Institut für Intelligente Systeme in Stuttgart. ,„Wir wissen grundsätzlich, dass es einen zentralen Bewegungsmuster-Generator bei Tieren und Reflexe gibt. Wie aber werden beide so kombiniert, dass sie mit den Reflexen und dem Bewegungsmuster-Generator lernen können?“ Um ein System zur Erforschung dieser Frage zu entwickeln, haben Badri-Spröwitz und sein Kollege Felix Ruppert den vierbeinigen Roboter „Morti“ gebaut. „Es handelt sich um ein System, das wie ein Tier Reflexe besitzt und aus Fehlern lernt“, sagt Ruppert.
Lernalgorithmus schult ein virtuelles Rückenmark
Morti ist mit einem Bewegungsmuster-Generator in der Form eines kleinen Computers ausgestattet, der die künstlichen Muskeln und Sehnen in den Beinen steuert und damit seinem biologischen Vorbild entspricht. Bei Menschen und Tieren bilden Netzwerke aus Nervenzellen im Rückenmark dieses System, die ohne Einfluss des Gehirns rhythmische Muskelkontraktionen veranlassen. Solange ein Jungtier problemlos unterwegs ist, sendet diese Steuerung unverändert seine basalen Bewegungssignale. Dies ändert sich, wenn das Tier strauchelt. Dann schalten sich Reflexe dazu und passen das Bewegungsmuster an, damit es nicht hinfällt. Wenn das Tier wiederholt durch Abläufe stolpert, die grundlegend suboptimal sind, können Lernprozesse zu einer bleibenden Anpassung der Bewegungsmuster führen, erklären die Forscher.
Genau diese Fähigkeit konnten sie Morti nun ebenfalls verleihen. Möglich wurde dies durch einen sogenannten bayesischen Optimierungs-Lernalgorithmus, der die Entwicklung des zunächst nicht optimal eingestellten Bewegungsmuster-Generator beeinflusst. Sensorinformationen von den Füßen werden dabei mit den Solldaten des Computers – des virtuellen Rückenmarks – abgeglichen. Der Roboter lernt dann immer besser zu laufen, indem er die Struktur der gesendeten Bewegungsmuster kontinuierlich an die Sensorinformationen angleicht, erklären die Wissenschaftler. Konkret heißt das: Stolpert der Roboter, ändert der Lernalgorithmus, wie weit die Beine vor und zurück schwingen, wie schnell sie sich bewegen und wie lange ein Bein auf dem Boden bleibt. Der „upgedatete“ Bewegungsmuster-Generator sendet anschließend Signale, die dem Roboter ein möglichst stolperfreies Laufen ermöglichen: Morti lernt dadurch schrittweise, immer geschickter zu laufen.
Souveräner Gang nach einer Stunde
Wie sich zeigte, ist der Roboter seinen biologischen Vorbildern dabei sogar etwas überlegen: Im Gegensatz zu Jungtieren entwickelt Morti aus seinem zunächst holprigen Gang auf dem Laufband schon innerhalb einer Stunde ein sicheres Fortbewegungsmuster. Die Optimierung spiegelt sich dabei auch im Energievierbauch beim Laufen wider, berichten die Wissenschaftler: Durch die verbesserte Ausnutzung der Vorteile seiner Mechanik verbessert der Roboter seine Energieeffizienz um 42 Prozent. Ruppert und Badri-Spröwitz ist also die Entwicklung eines Modells des tierischen Laufen-Lernens gelungen. „Unser Roboter wird sinnbildlich geboren und weiß nichts darüber, wie seine Beine funktionieren. Unser System funktioniert wie eine eingebaute automatische Laufintelligenz, welche die Natur uns bereitstellt und die wir auf den Roboter übertragen haben“, resümiert Ruppert.
Wie die beiden Wissenschaftler erklären, kann das System nun weiterentwickelt werden und damit der Grundlagenforschung an der Schnittstelle zwischen Robotik und Biologie dienen. Denn auch aus technischer Sicht ist ihr System offenbar interessant: Der Computer in Morti verbraucht lediglich fünf Watt. Andere lernfähige Systeme mit vergleichbaren Leistungen sind deutlich energiebedürftiger, sagen die Forscher. Vor allem aber bildet Morti die Natur ab: „Das Robotermodell kann uns Antworten auf Fragen geben, die die Biologie allein nicht beantworten kann“, sagt Badri-Spröwitz.
Quelle: Max-Planck-Institut für Intelligente Systeme, Fachartikel: Nature Machine Intelligence, doi: 10.1038/s42256-022-00505-4


















