Vögel bewegen sich scheinbar mühelos sowohl am Land als auch in der Luft. Während ihre Beine in der Luft eher Ballast sind, erfüllen sie am Boden wichtige Funktionen. Die Vögel können damit laufen, hüpfen, springen und je nach Art sich beispielsweise zusätzlich an Bäumen festhalten oder Beutetiere fangen. Dabei müssen die Beine zwei entgegengesetzte Anforderungen erfüllen: Sie müssen zum einen möglichst kräftig sein, um die Gegebenheiten auf dem Boden zu meisten, und zum anderen möglichst leicht, um den Flug so wenig wie möglich zu stören.
Kompromiss zwischen Funktion und Gewicht
„Ingenieure streben eine ähnliche Multimodalität bei Flugrobotern an, um deren Einsatzspektrum in verschiedenen Umgebungen zu erweitern“, erklärt ein Team um Won Dong Shin von der Eidgenössischen Technischen Hochschule Lausanne in der Schweiz. „Es ist jedoch nach wie vor schwierig, die vielfältigen Fortbewegungsmöglichkeiten zu reproduzieren und gleichzeitig die leichte Masse für den Flug zu erhalten.“
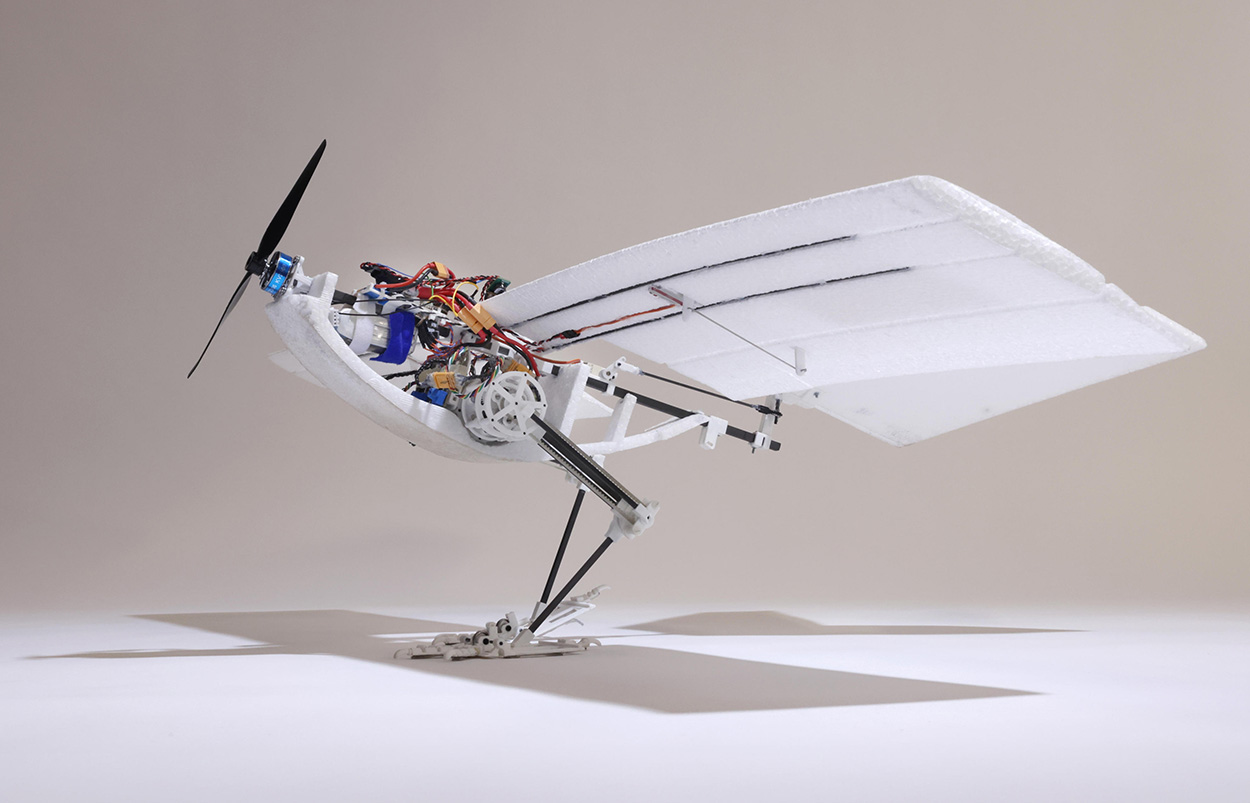
Diese Herausforderung haben Shin und sein Team nun bewältigt. Ihr Flugroboter mit dem Namen RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments) ist etwa so groß und schwer wie eine Rabenkrähe und kann sich ähnlich wie sie fortbewegen. „RAVEN nutzt seine von Vögeln inspirierten Beine, um schnell in den Flug zu springen, auf dem Boden zu gehen und über Hindernisse und Lücken zu hüpfen“, berichtet das Team.
Sprung in den Flug besonders effizient
Die Beine des Flugroboters haben ebenso wie Vögel Gelenke in der Hüfte und im Knöchel. Der Fuß wird zudem durch bewegliche Zehen mit passiven elastischen Gelenken stabilisiert. Auf ein Kniegelenk haben die Entwickler verzichtet, um das Design so einfach und leicht wie möglich zu gestalten. Für eine kräftige Sprungkraft sind Knöchel und Füße jeweils mit einer Feder ausgestattet. Damit kann RAVEN bis zu 37 Zentimeter hoch und 26,6 Zentimeter weit springen und auf diese Weise Hindernisse und Lücken in seiner Umgebung überwinden, ohne Energie für einen Flug aufwenden zu müssen.
Auch für den Flugstart sind die Beine nützlich. „Wir zeigen, dass das Springen zum Abheben wesentlich zur anfänglichen Abhebegeschwindigkeit beiträgt und bemerkenswerterweise energieeffizienter ist als das Abheben ohne den Sprung“, berichtet das Team. So erreicht der Roboter, wenn er abspringt, eine Geschwindigkeit von 2,2 Metern pro Sekunde – ähnlich viel wie echte Krähen und nur geringfügig weniger, als wenn unter hohem Energieaufwand zusätzlich ein Propeller läuft. Sowohl mit Blick auf die Energieeffizienz als auch mit Blick auf die Beschleunigung war der gesprungene Start anderen Strategien demnach deutlich überlegen.



