Mikroroboter gelten als vielversprechender Ansatz, um technische Helfer und Sensoren in der Medizin, in technischen Systemen oder auch bei der Umweltüberwachung einzusetzen. Sie können dorthin vordringen, wo ein Mensch oder größeres Werkzeug nicht hinkommt und beispielsweise Wirkstoffe oder anderer Substanzen dorthin bringen oder aber Informationen von solchen Orten übermitteln. Wenn solche Mikroroboter im Schwarm agieren, kann dies ihre Anwendungsmöglichkeiten zusätzlich erweitern. „Bisher ist es aber nur selten gelungen, die komplette Spanne der Funktionalitäten – einen komplett kabellosen Betrieb, unabhängige Programmierung und modulare Rekonfigurierbarkeit in einer mikrorobotischen Plattform zu integrieren“, erklären Yeji Lee von der Technischen Universität Chemnitz und ihre Kollegen. Anders ausgedrückt: Oft waren solche modularen Mikroroboter von externen Steuerungseinheiten abhängig, die ihnen ihre Befehle übermittelten, weil die nötige Elektronik in den winzigen Robotern keinen Platz mehr fand.
Origami mit Mikrochip, Solarzellen und Co
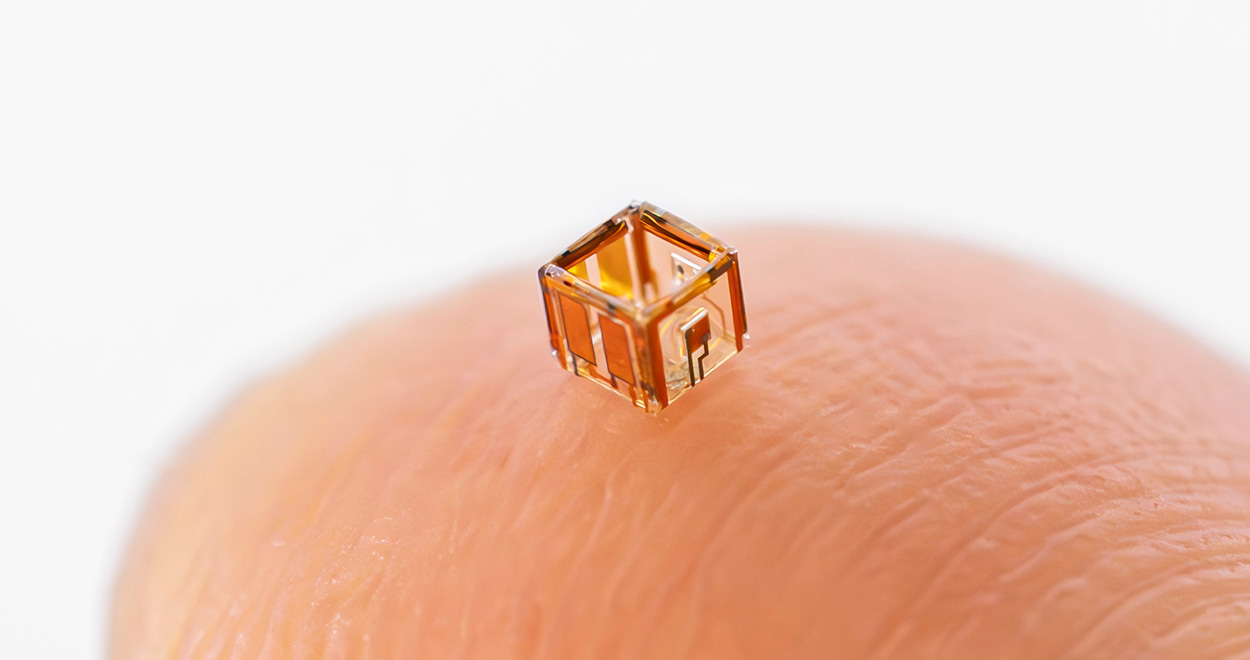
Dies ist bei den nun neu entwickelten „Smartlets“ des Chemnitzer Forschungsteams anders. Die nur einen Millimeter kleinen Mikroroboter tragen winzige, ultraflache Mikrochips, durch die sie gesteuert werden und autonom agieren können. Über integrierte Solarzellen und eingebettete Mikro-LEDs und Fotodioden können diese würfelförmigen Mikroroboter zudem miteinander kommunizieren und sich in ihrer Umwelt orientieren. „Zum ersten Mal demonstrieren wir eine in sich geschlossene Mikrorobotereinheit, die nicht nur auf Reize reagiert und sich fortbewegt, sondern auch mit anderen Mikrorobotern auf programmierbare und autonome Weise interagiert”, erklärt Seniorautor Oliver Schmidt von der TU Chemnitz. Die Smartlets sind zudem so gebaut, dass sie relativ einfach in großen Mengen mit gängigen Industriemethoden produziert werden können.
(Video: TU Chemnitz / MAIN)
Basis der Roboter bildet ein Polymer-Dünnfilm, auf den an verschiedenen Stellen mehrschichtige elektronische Bauteile aufgebracht werden. Diese umfassen einen flachen Silizium-Mikrochip, ein sogenanntes Lablet, als Steuereinheit, Golddrähte als Leitungen und an den Rändern des Dünnfilms mehrere mikroorganische Solarzellen sowie flache Mikro-LEDs und Fotosensoren. Dieser zunächst in einer Ebene auf der Waver-Oberfläche gefertigte Grundaufbau faltet sich bei Aktivierung von selbst zu einem winzigen hohlen 3D-Würfel zusammen. Die biegsamen Solarzellen werden dabei an den Kanten des Würfels eingerollt. „Die strategische Positionierung der organischen Solarzellen an den acht Kanten des Smartlets und ihre Verknüpfung in Serie erlaubt es, Solarenergie aus allen Richtungen zu ernten und erhöht die erzeugte Spannung“, erklären die Forschenden. “Unter Standardbeleuchtung produzierten die gerollten Solarzellen im Smartlet eine Leistung von bis zu 37,5 Mikrowatt.“ Dies reicht aus, um die Steuerelektronik, zwei Mikro-LEDs und zwei Fotosensoren für die optischen Kommunikation und die Antriebseinheit des Mikroroboters mit Strom zu versorgen.



